


Описание


1. Краткое описание продукции
USBCNCV4.0 является высокопроизводительным контроллером движения, который основан на ПК программного обеспечения USBCNC управления, система может завершить преобразование из G кода для подключения сигнала управления движения водителя шагового двигателя, не требуя каких-либо дополнительных аппаратных средств и программного обеспечения. Эта плата управления совместима с большинством шагового драйвера и сервопривода, это идеальный контроллер, который вместо параллельной платы интерфейса Mach3.
2. Требования к компьютерной системе
Минимальной конфигурации:
1) Процессор: 1 ГГц
2) память: 512 Мб
3) 500 МБ свободного дискового пространства
4) графическое устройство DIRECTX9 с драйвером WDDM 1,0 или выше
5) интерфейс USB 2,0
6) Net FRAMEWORK 3.5SP1
Рекомендуемая конфигурация:
1) Процессор: 2 ГГц dikaryon
2) Память: 2 Гб;
3) 1G свободного места на диске
4) графическое устройство DIRECTX9 с драйвером WDDM 1,0 или выше
5) интерфейс USB 2,0
6) Net FRAMEWORK 3.5SP1
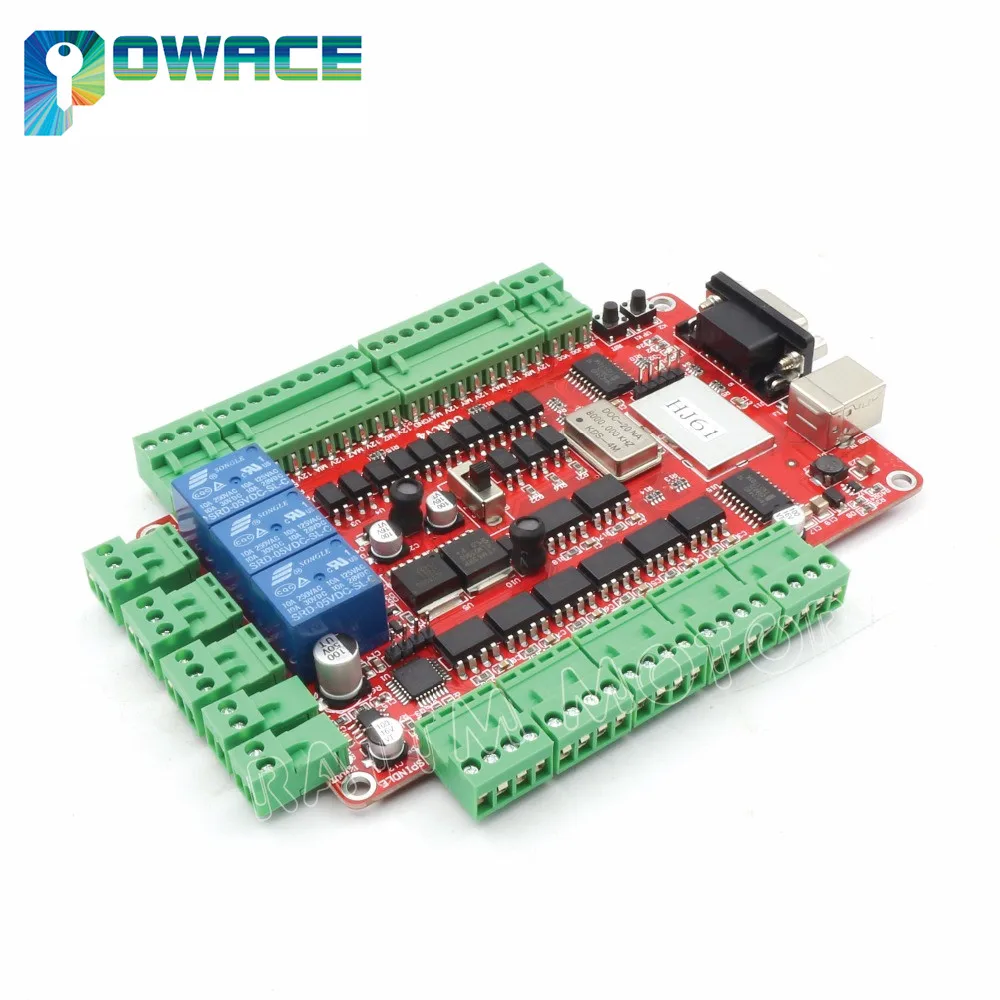
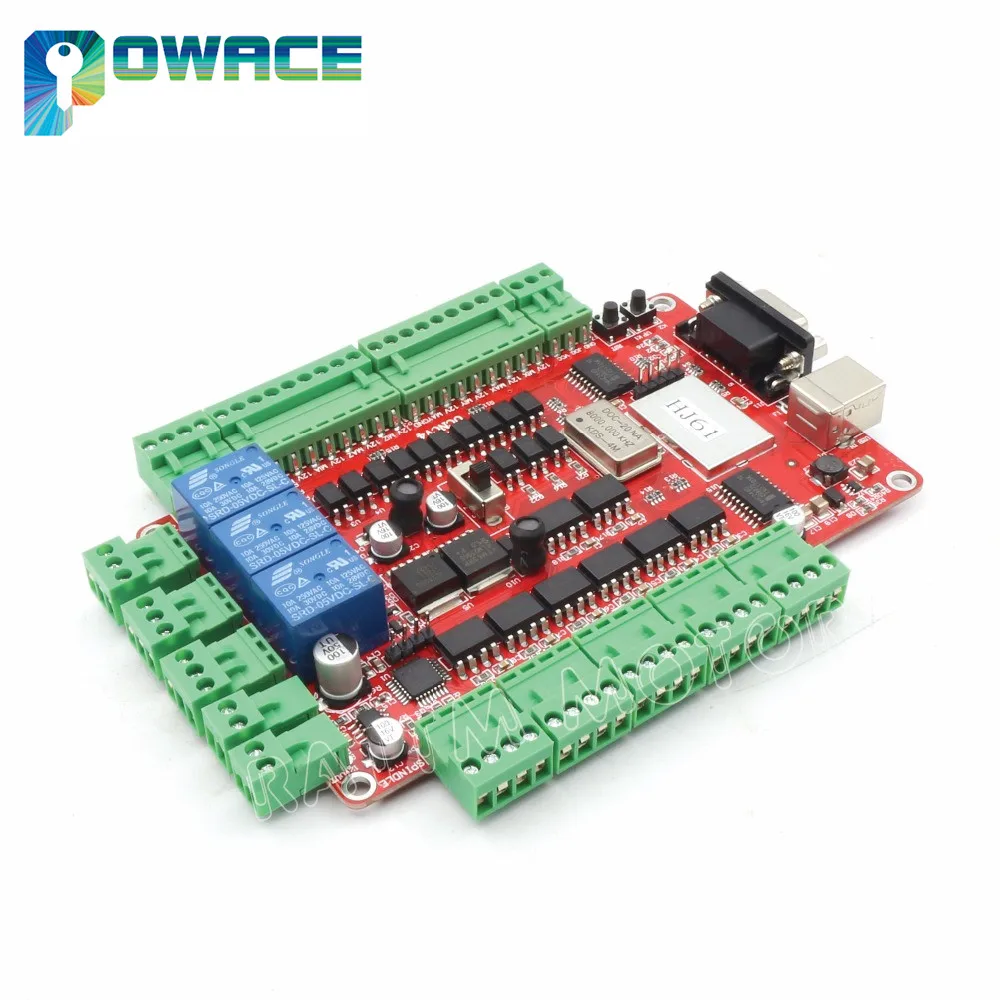
3. Внешний вид и размер производства
1. После проверки версия V4 использует красную печатную плату, размер печатной платы составляет 135,3*82,5 мм;
2. Передняя часть узкого края размещена с интерфейсом связи USB и интерфейсом ручного управления DB9 для удобства клиентов, вытянутых непосредственно из панели чехол;
3. задний конец узкого края-это входной и выходной интерфейс питания и 3 релейный выходной интерфейс; реле-это сильный источник помех, реле вдали от дизайна основного чипа управления, это способствует стабильности платы;
4. Одна из двух широких сторон-шаговый двигатель и главный сигнал axiscontrol;
5. Другая сторона двух широких сторон-Аварийная остановка, ручной ввод скорости, ограничение входного интерфейса; одна сторона для входа, другая сторона выходного режима подключения проста и удобна;
6. 5 В и 12 В силовой модуль компактная самостоятельность, безопасность, стабильность;
7. Внешнее обеспечение стабильности системы эффективно работает с кристаллом активный и главный чип управления щит;
8. Программное обеспечение USBCNC, а не mach3, пожалуйста, обратите внимание!
4. Подробное функциональное введение
A. Входное напряжение карты: 15 ~ 36 В;
B. Предельное рабочее напряжение порта: 12 В;
C. Шаговый двигатель контроль сигнала Выходное напряжение: 5 В;
D. Внешнее напряжение питания: 12 В;
Примечание: помеченный 15 ~ 36VDC является входным интерфейсом, помеченный 12 V является выходным интерфейсом, не может проводка неправильно.
Не имеет рабской функции!
5. Функция и определение каждого модуля
A) USB интерфейс, подключение к компьютеру USB порт через этот интерфейс, вы можете использовать программное обеспечение usbcnc для управления этой платой, Этот USB интерфейс является квадратным интерфейсом B, пожалуйста, используйте USB2.0 соединительный кабель, который с экранированием и магнитным и не должен превышать 2 м в длину.
B) интерфейс ручного управления, внешний ручной блок управления может использовать этот интерфейс для доступа к системе, интерфейс является стандартной формой DB9, его определение как показано в следующей таблице.
Таблица 4-1 определение интерфейса ручного управления

C) индикатор питания, как показано на рисунке выше D10 индикатор является фронтальным индикатором питания USB, этот светильник загорается после подключения USB порта к компьютеру, d2 в ниже находится задний индикатор питания Светильник, этот светильник также загорится, когда плата карты работает доступ к питанию с ним.
D) Кнопка обновления прошивки платы и кнопка сброса RST, прошивка была обновлена, поэтому кнопку обновления не нужно использовать, кнопка сброса используется при необходимости перезапуска из-за неисправности платы.
E) ручной интерфейс управления скоростью, режим подключения проводов, как показано на следующем рисунке.
F) лимитный входной интерфейс. Определения предельных интерфейсов приведены в следующей таблице
Таблица 4-2 определение предельного интерфейса
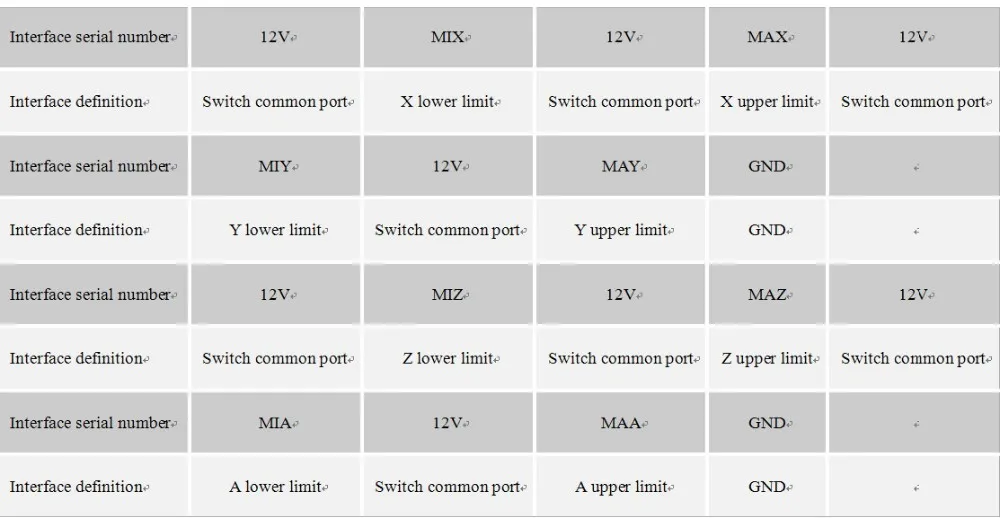
Концевое соединение переключателя, как показано на рис. 1-8 ~ рис. 1-10
G) переключатель управления шпинделем, как показано на рис. 1-6, переключатель переключается до положения S1 для управления скоростью вращения шпинделя; переключение положения переключателя на ниже для контроля выходного сигнала Реле тумана.
H) Внешняя пауза и интерфейс сброса; 2 фута помечены пауза подключения приостанавливают переключатель, 2 фута помечены сброс подключения сброса переключатель.
I) программное обеспечение управления туманом релейный выход, настройки программного обеспечения выход отмечен 3, определяется сверху вниз, 3 футаNC,Нет, COM.
J) релейный выход программного обеспечения управления потоком, выход отмечен 2 в настройках программного обеспечения, определяется сверху вниз, 3 футаNC,Нет, COM.
K) релейный выход программного обеспечения управления шпинделем, выход отмечен 1 в настройках программного обеспечения, определяется сверху вниз, 3 футаNC,Нет, COM.
L) Рабочая мощность платы,Уровни выше отрицательных ниже, как доска подписана, пожалуйста, обратите внимание на вход DC 15 ~ 36 В, перенапряжение или обратное соединение повредит плату.
М) выходной интерфейс 12 В. Как указано на плате, GND is-, 12 V is +.
N) выходной интерфейс управления шпинделем: определения поворота для GND DIR PWM2 12 В, соответственно, это земля, направление сигнала, шпиндель 0 ~ 10 в Скорость управления выходной сигнал, 12 В выход.
O) Ось шагового двигателя управления выходной сигнал, определение: CK + \ CK-\ DIR + \ DIR-, соответственно иммульсионный положительный, иммульсионный отрицательный, направление положительное, направление отрицательное, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе, чтобы связаться с 5 В на плате, эта плата не поддерживает общий метод подключения катода, Конкретные методы подключения относятся к рис. 1-11. Эта плата не содержит управления enable, теперь большинство водителей на рынке не должны подключаться к сигналу EN и непосредственно работать регулярно по умолчанию.
P) Z оси шагового двигателя управления выходной сигнал, определение CK + \ CK-\ DIR + \ DIR-, соответственно для импульсного положительного, импульсного отрицательного, направления положительного, направления отрицательного, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе с 5 В на плате, эта плата не поддерживает общий метод подключения катода.
Q) ось Y шагового двигателя управления выходной сигнал, определение CK + \ CK-\ DIR + \ DIR-, соответственно для импульсного положительного, импульсного отрицательного, направления положительного, направления отрицательного, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе с 5 В на плате, эта плата не поддерживает общий метод подключения катода.
R) X оси шагового двигателя управления выходной сигнал, определение CK + \ CK-\ DIR + \ DIR-, соответственно для импульсного положительного, импульсного отрицательного, направления положительного, направления отрицательного, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе с 5 В на плате, эта плата не поддерживает общий метод подключения катода.
Характеристики
- Номер модели
- USBCNCV4.0
- Item
- 4 axis USBCNC controller
- Color
- Red
- Weight
- 0.45kgs
- Port
- USB port
- Size
- 13.53x8.25CM
- is_customized
- Yes
- Place of Origin
- Jiangsu, China (Mainland)
Сопутствующие товары

![[ЕС/б/у оборудование свободный Ват] 4 трехосный контроллер ЧПУ TB6560 Драйвер шагового двигателя доска V типа высокоскоростной оптосоединитель& DB25 кабель](https://ae01.alicdn.com/kf/HTB1LbXHkBHH8KJjy0Fbq6AqlpXaJ.jpg_220x220xz.jpg)




